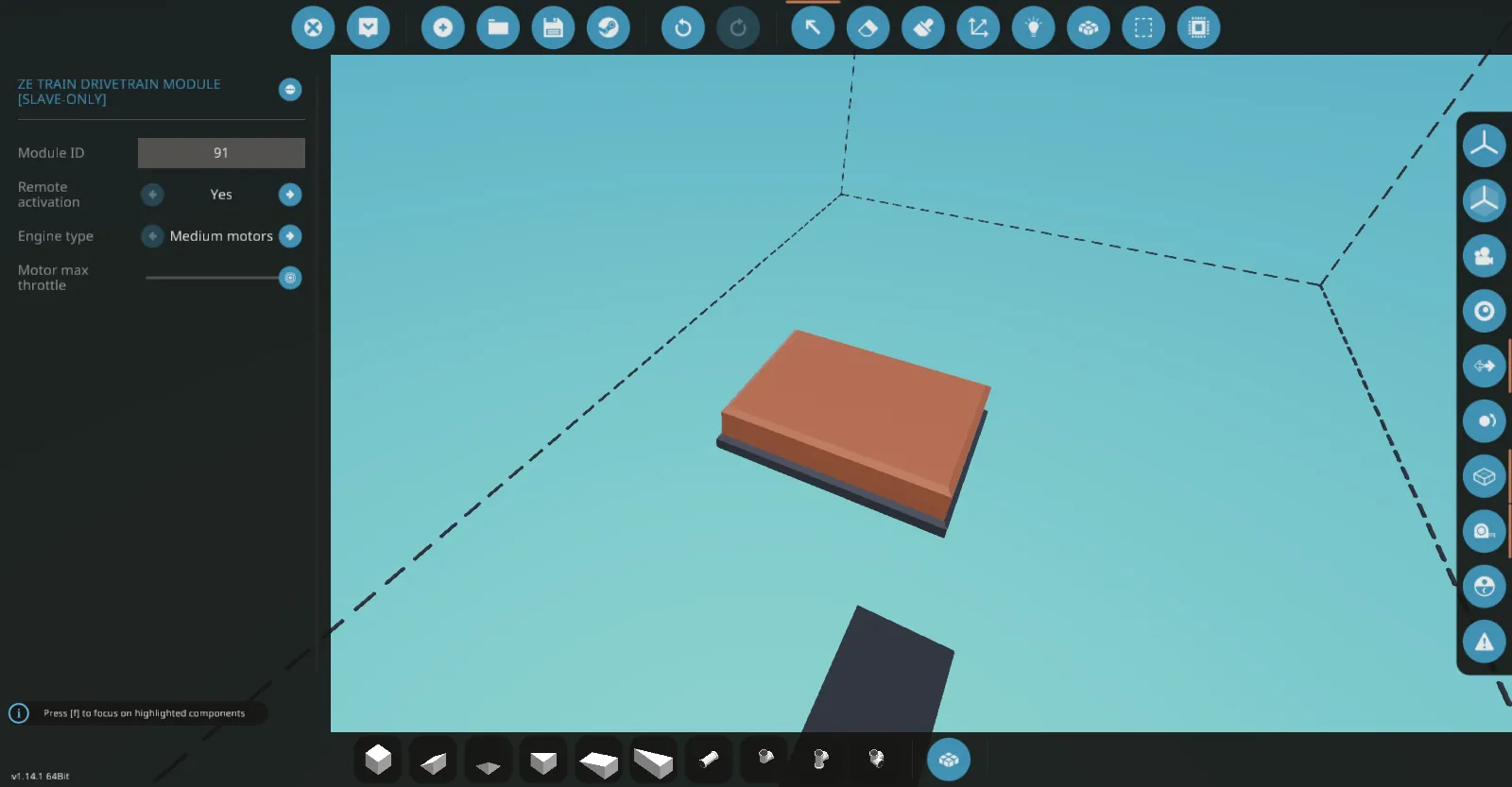
- Simplified version of the drivetrain controller for powered and unpowered cars, which can be only slaves.
- Motor related nodes are optional and can be removed. Does not calculate the motor throttle based at target speed, but instead uses the motor throttle value of the master car.
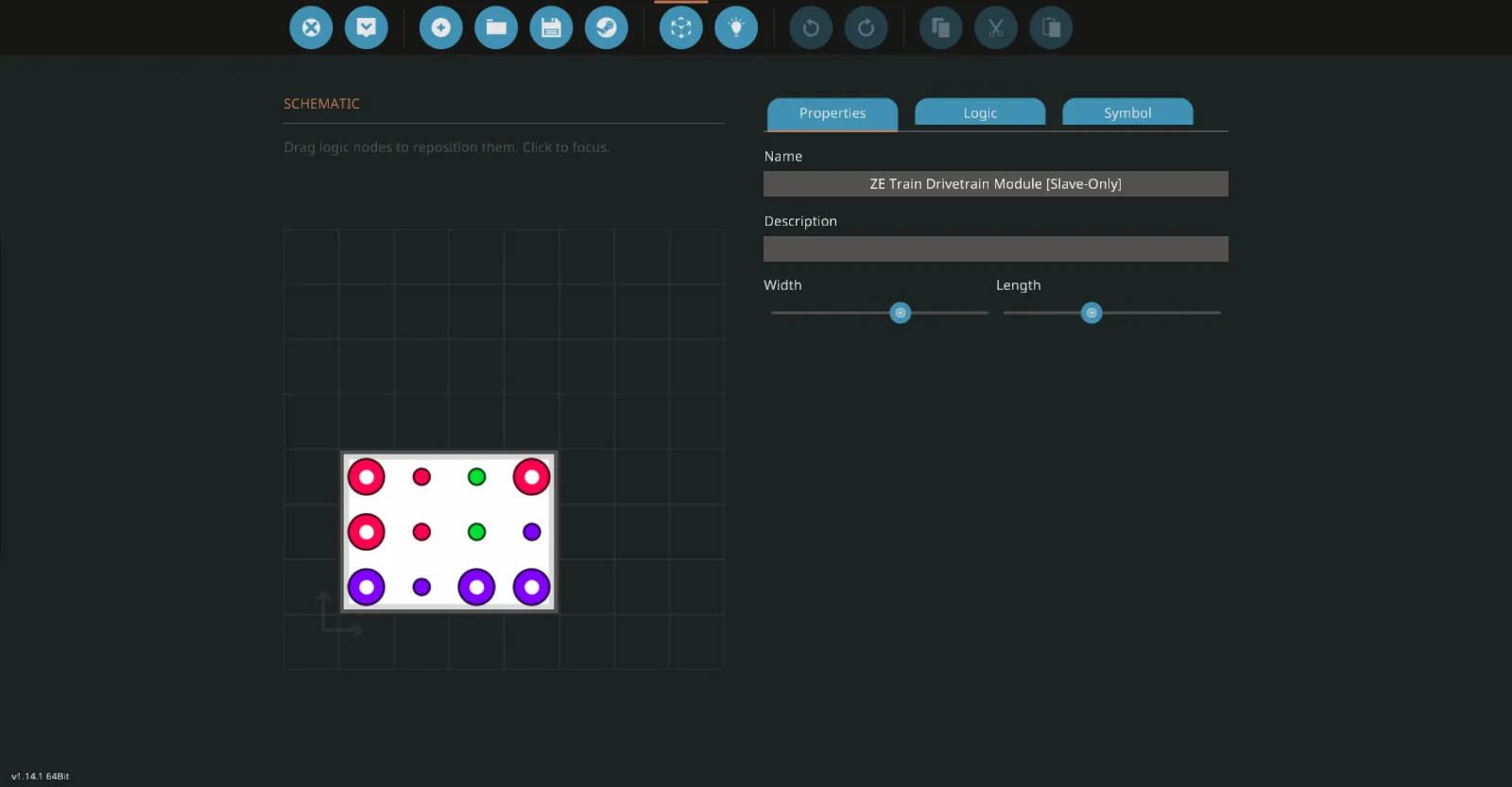
- Panel indicators composite channels are the same as those of the drivetrain controller:
Boolean:
[list] - Brake.
- Slow mode.
- Reverse relative to the front cab.
- Reverse relative to the rear cab.
- Activated.
- Remotely activated.
- Emergency brake.
- Emergency brake flashing indicator.
Numeric:
- Target speed in m/s.
- Brakes value.
- Motor throttle value.
[/list]