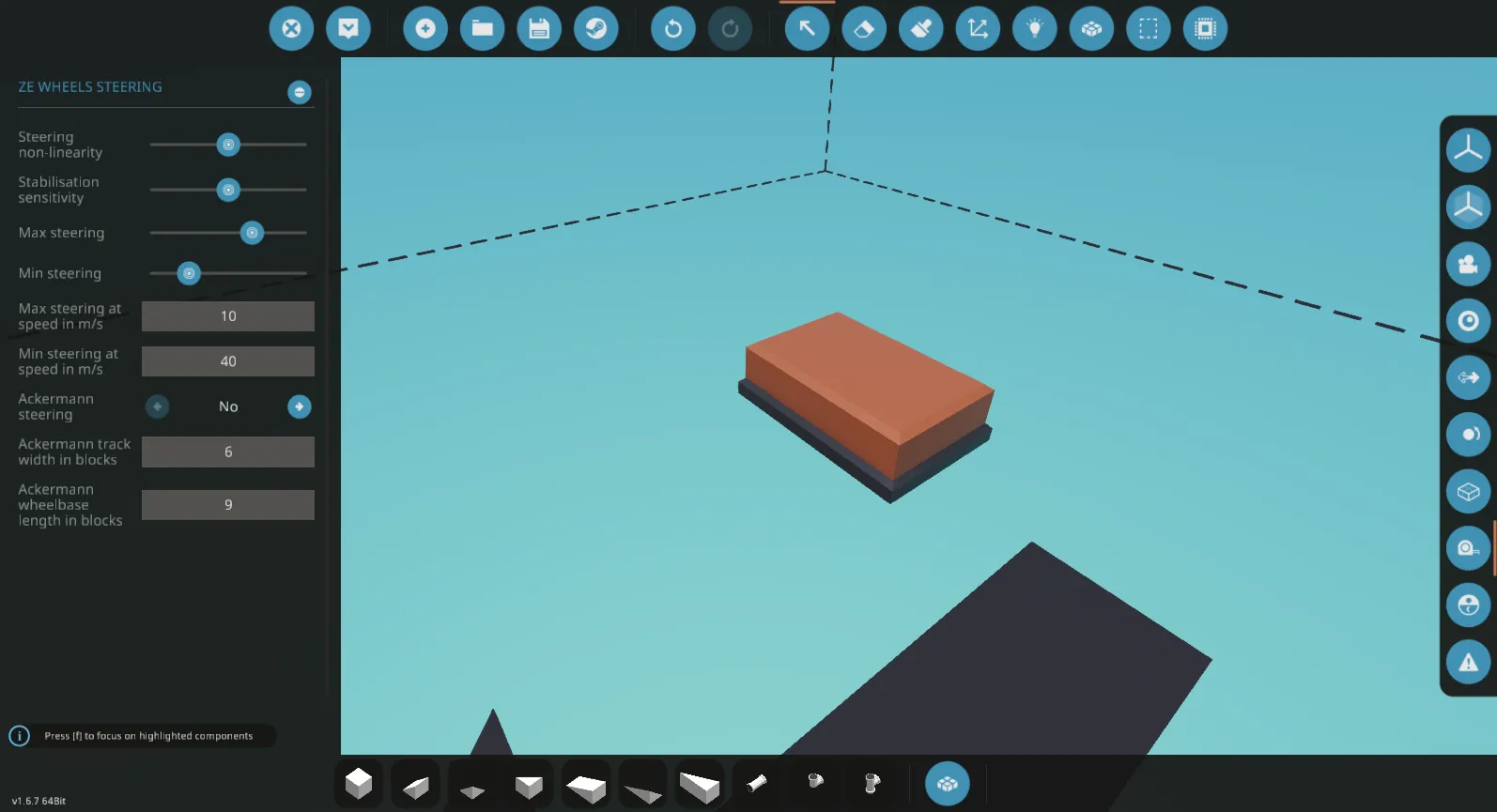
A controller for the wheel steering with dynamic reduction, optional angular stabilisation, and optional Ackermann steering.
- Steering non-linearity is a modifier for the steering axis. The larger the value of the slider, the slower the steering value increases and the faster it decreases compared to the unmodified axis. Combine it with the adjustment of seat axis sensitivity to get the most comfortable steering curve.
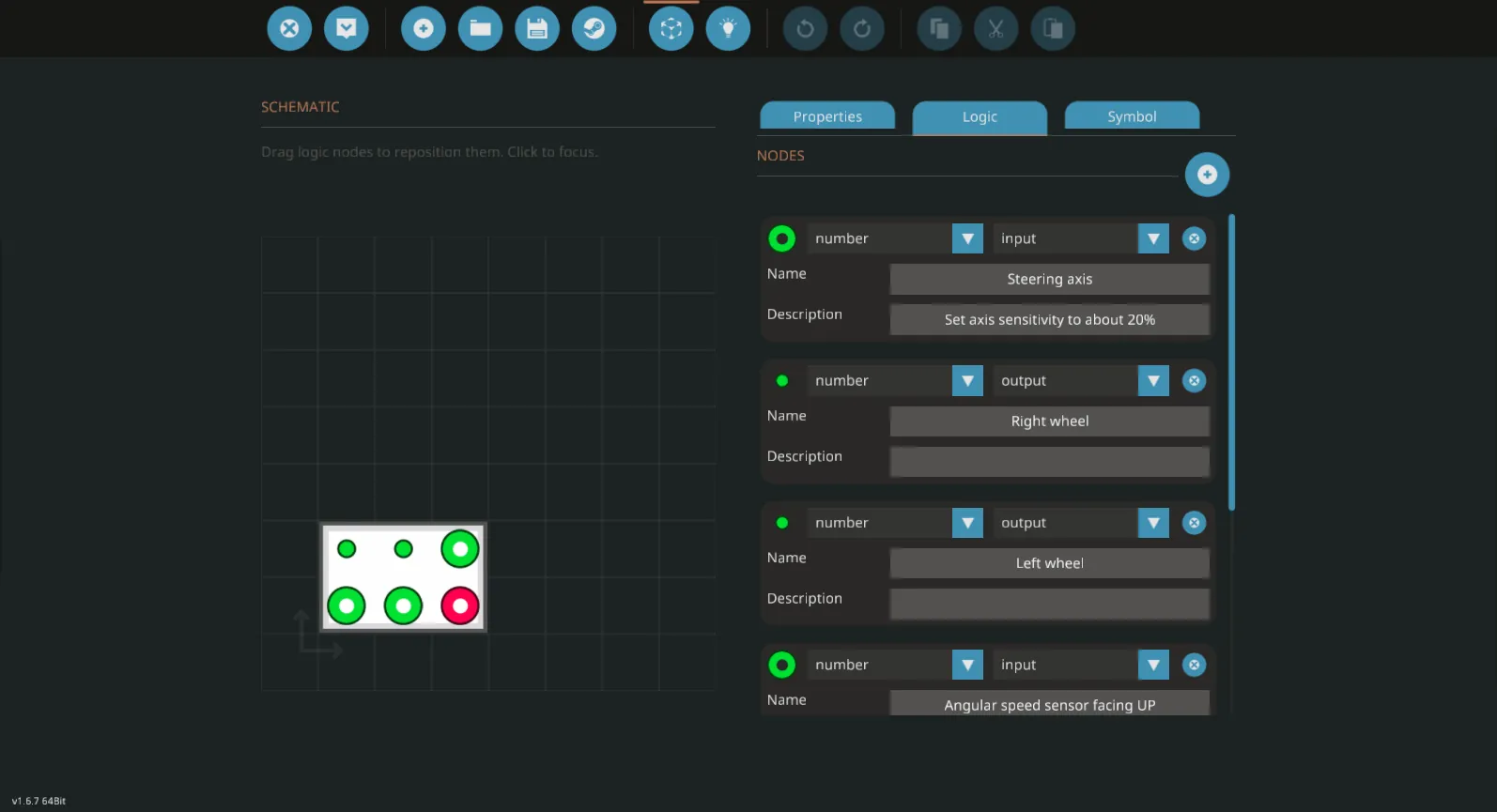
- Dynamic reduction changes the steering axis multiplier in range between the min and max steering sliders, depending on current speed. Reduction starts at the speed threshold for max steering and becomes full at the speed threshold for min steering in m/s. If you don't need the reduction, set the min and max steering sliders to be equal or just don't connect the linear speed node.
- If you don't need the angular stablilisaiton, set the stabilisation sensitivity slider to 0 or just don't connect the nodes for angular speed and reverse.
- For the Ackermann steering you should set the correct wheelbase length and track width of your vehicle in number of blocks. If you need multi-axle steering, duplicate the function gates with formulas for Ackermann steering with the same node inputs, and specify the corresponding wheelbase length for every extra axle.
- Move the vehicle's center of mass forward for better cornering control.