Built with respect for naval history and realistic submarine physics. Ready for the Abyss.
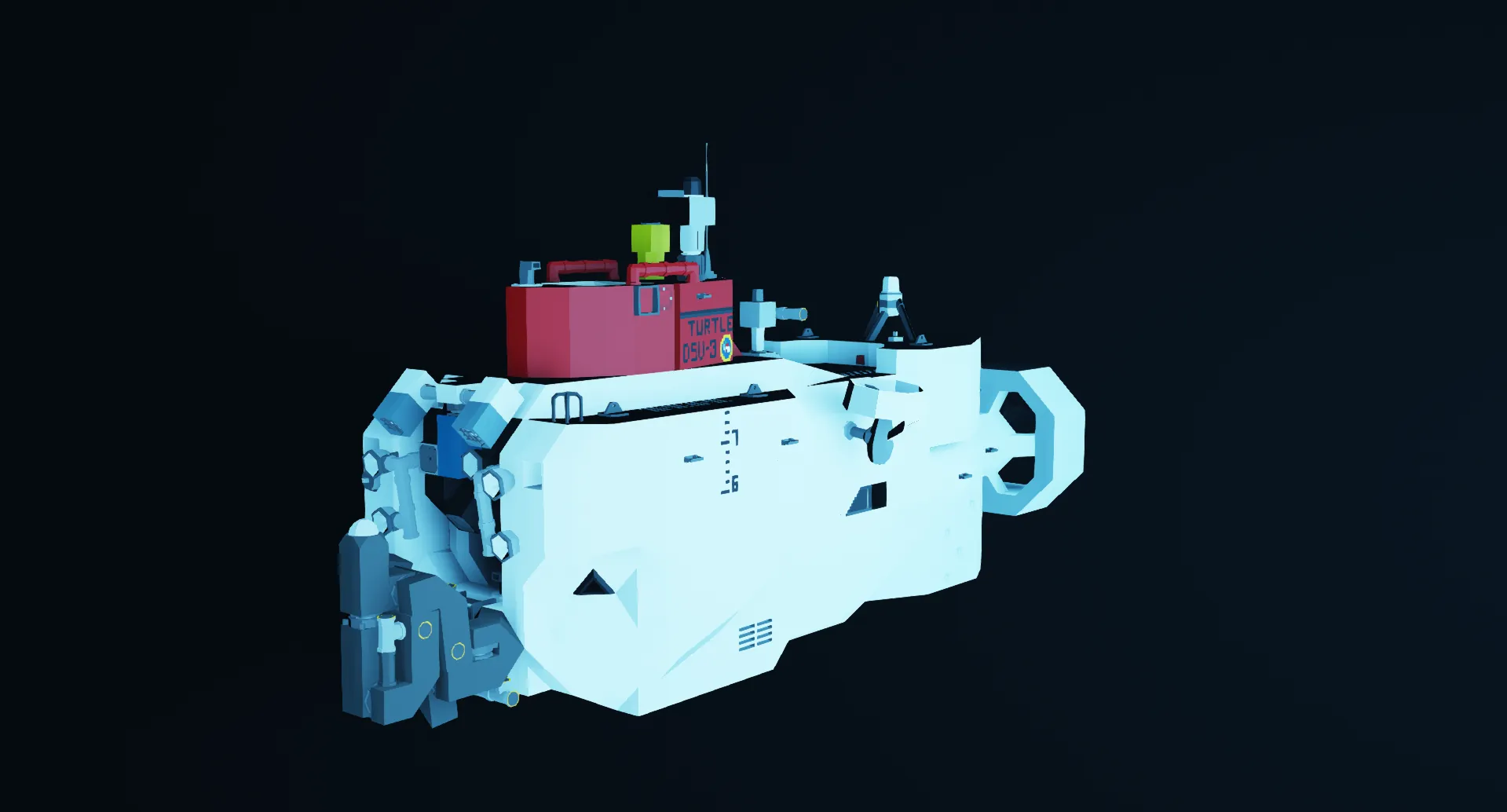
The DSV-3 Turtle is a legendary deep-sea exploration vehicle launched in 1968. Developed as a sister ship to the famous Alvin, the Turtle became a vital "workhorse" for the U.S. Navy and the oceanographic community.
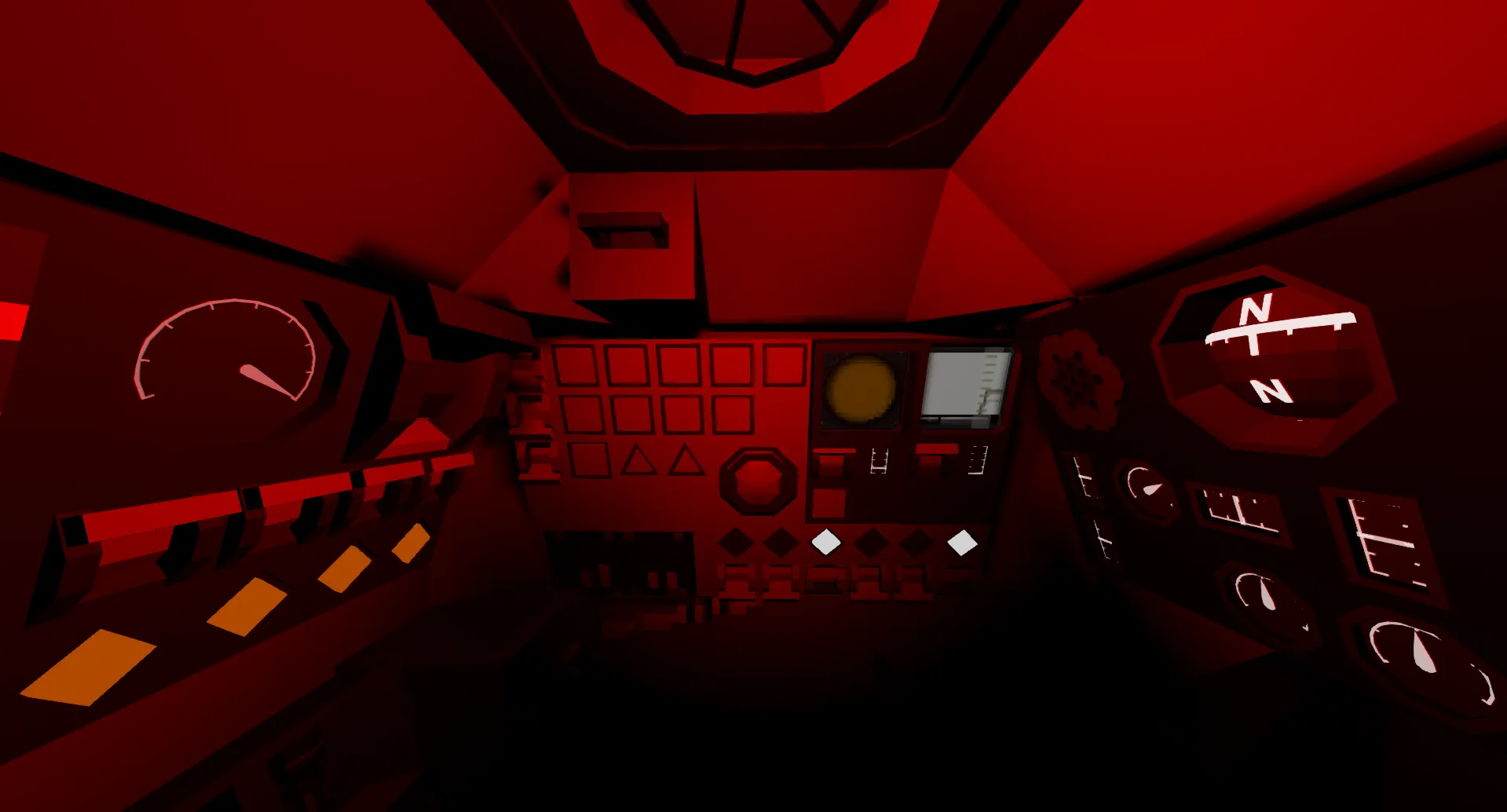
This replica recreates the raw atmosphere of early deep-sea missions. There are no modern touchscreens or GPS maps here - only analog gauges, manual ballast management, and the rugged 1960s engineering that paved the way for modern oceanography.
Historical Background
In the late 1960s, there was an urgent need for vehicles capable of operating at depths far beyond the reach of conventional submarines. Turtle was built as a deep-sea search, rescue, and research vessel. In the 1970s, she was famously upgraded with a new pressure hull (originally intended for Alvin), which allowed her to officially conquer depths of 3,000 meters (10,000 feet) and beyond.
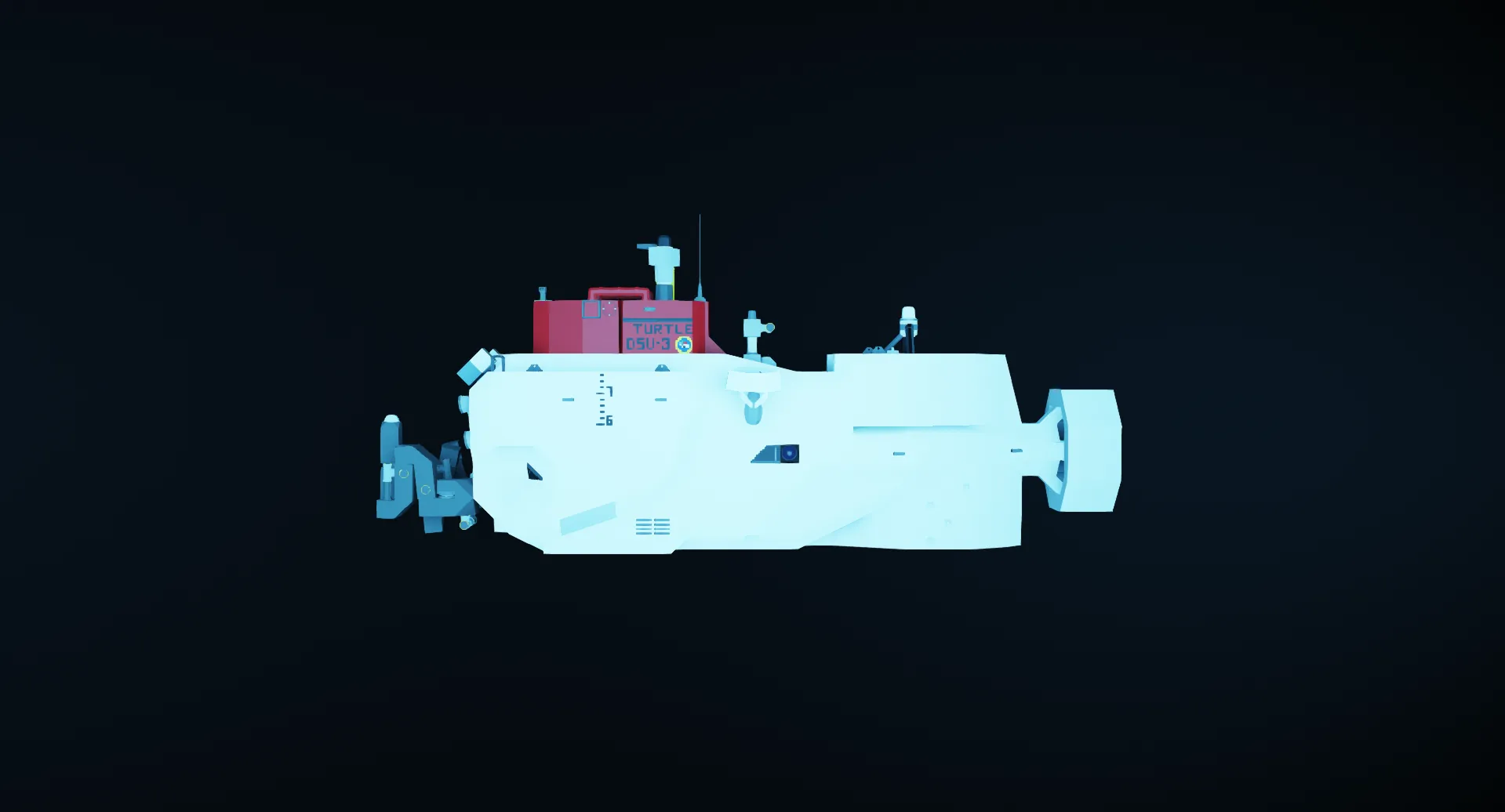
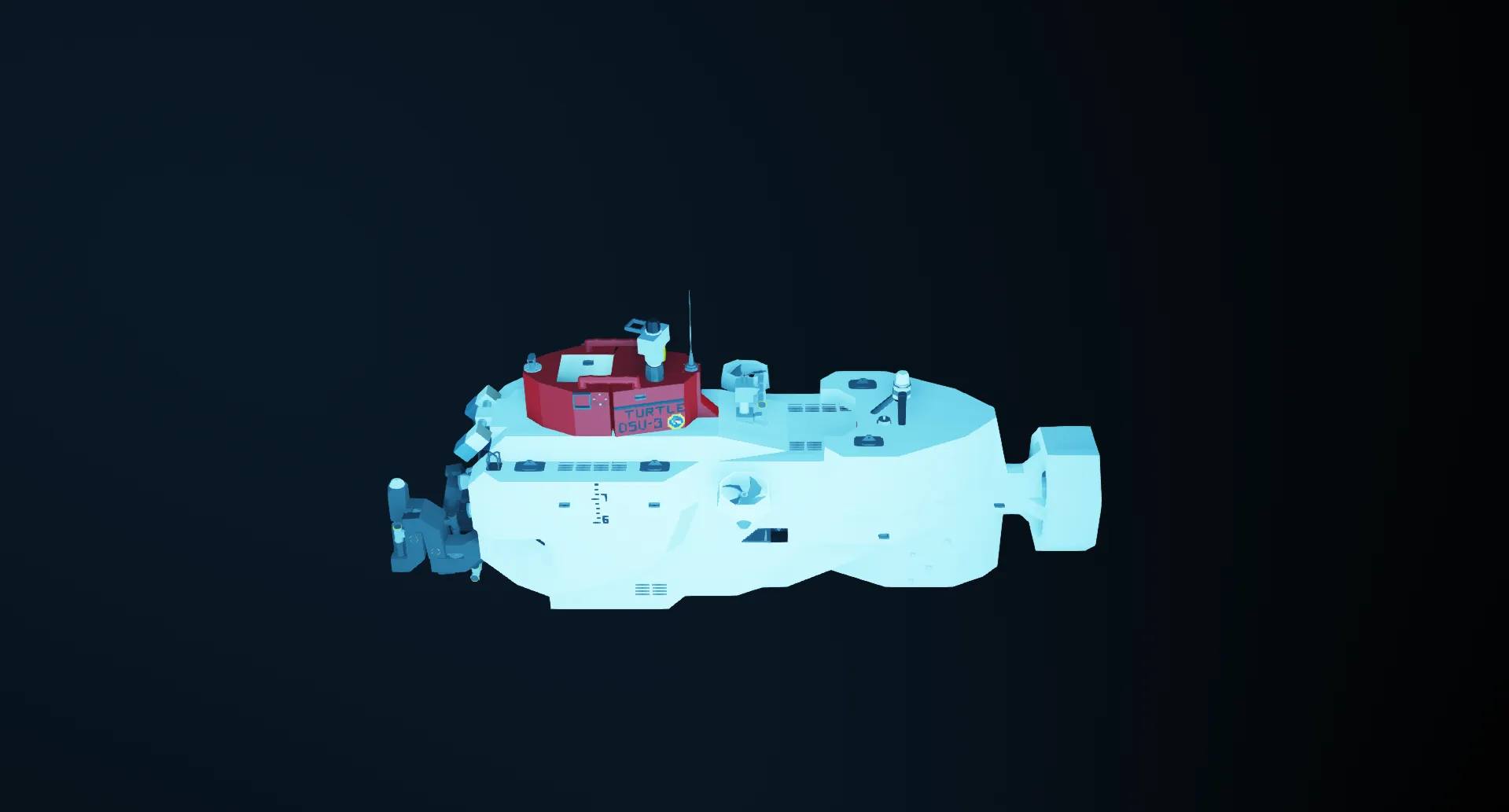
In Game Technical Specifications
-Operational Depth: 3,000m+
-Mass: 4891~
-Speed of gear (stern): 4KTS MAX
-Different ligthing modes
-2 Manipulators
-2 CCTV cameras
-Proximity warning Sonar STRAZA (Thanks to GERUNIMO)
-Sounding (DBK) LUA screen (Thanks to GERUNIMO)
-Advanced Navigation system (for 1960s)
-Advanced proppulsion control panel
-Emergency weights
-Emergency transponder
-Emergency Stroboscope light
-Small battery life
-other things i am lazy to mention
Quick guide on how to use
1.Enter the interior sphere, Turn on INTL LHT. (near the hatch)
2.Turn on all breakers on the back panel
3. Fill ballast (use button FLOOD BALLAST to achieve negative buoyancy).
4.When ballast filled (2400L~), the submersible will start descending.
5.turn on CCTV Monitor (right panel) and Sounding Monitor (left monitor).
When near the seabed(50-100M), turn on BALLAST NEUTRAL BUOYANCY switch.
6. Turn on distance warning sonar, PORT & STBD POD PIVOT, STERN SHROUD PIVOT.
7. Use W/S To elevate the thrusters, Use (A/D) to steer.
8. Observe the throttle controls (Hotkeys 1-6 Pilot seat)
9.Turn on communication block (front panel). Hold PTT (space) in pilot seat to talk. (The panel can be used as Radio/ underwater telephone, both works good. When submerged, the system automatically change to Underwater telephone. Underwater telephone has less range than radio)
10.Use light panel, manipulator panel, whatever you need down there
11. In the end of the work, drain ballasts, observe the Ballast level.
12. Start ascending.
OPTIONAL STEPS
13. When surfaced, enable RECOVERY LHT (is on the light control panel, RECOVERY LHT also enables transponder for convenient use).
14. Wait for help. If needed - fire emergency flare.
How to save battery power?
-It's worth noting that the DSV must be launched from a carrier vessel, or at least get towed. The DSV-3 Turtle cannot travel long distances or serve as a primary vessel. The battery is designed for approximately two hours of underwater operation. If you actively use the propulsion, this number can decrease significantly. You can charge battery back, using PORT or STBD charging ports (in the middle).Turn off the propulsion power breaker whenever possible!
If you come to the problem of the ballast control, and switch ''BALLAST NEUTRAL BUOYANCY'' don't work properly, you are able to put neutral buoyancy manually. The neutral buoyancy ballast level is 2040~ liters.
The images might not show the true result
The submersible might have some problems and errors, feel free to leave a comment to describe the problems!