HMDに描画する、単レーダー、ゼロマージのFCSです。
・ミサイルレーダーを除いた全てのレーダーで使用することができます。
・ノイズフィルタリングと最低限のアンチチャフ、予測照準機能などを搭載し、低負荷、低コスト、省スペースを実現しつつ、ある程度の精度が期待できます。
・ELI2出力に対応した弾道計算機と接続可能です。
設置方法
①レーダーを設置し、Sweep ModeをManualに設定、radar(コンポジット入力)とradar rotation(コンポジット出力)をそれぞれレーダーと接続する。
②フィジックスセンサーを設置し、physics(コンポジット入力)と接続する。
③座席を設置し、seat(コンポジット入力)とseat HMD(映像出力)を座席と接続する。
④弾道計算機に、ELI2(コンポジット出力)を接続する。
操作説明
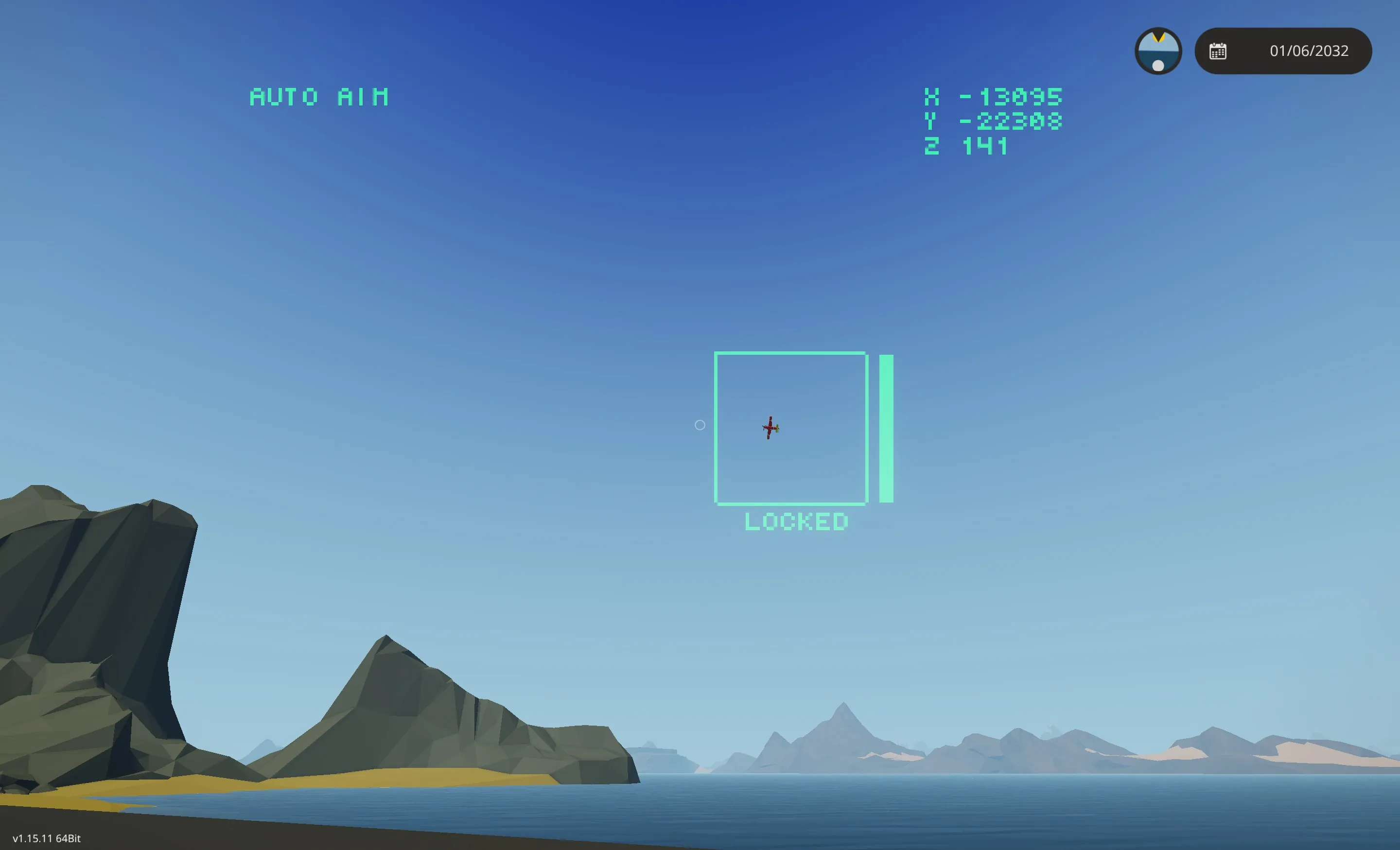
・キーボード1:ロックした状態で標的を自動追尾します。この状態では左上に「AUTO AIM」と表示されます。
・視点操作:座席のHMDから目標を一定時間中央の四角形の中にとらえると、四角形の下に「LOCKED」と表示され目標の座標が出力されます。
設定項目
physics to radar offset x/y/z:フィジックスセンサーからレーダーまでの距離オフセット (単位 m)
seat to physics offset x/y/z:座席からフィジックスセンサーまでの距離オフセット (単位 m)
upside down:レーダーを上下逆さに設置する際に有効化
radar FOV x/y:レーダーのFOV X/Yを入力
radar dis min:レーダーの探知できる最小距離を入力(単位 m)
sample tick:ノイズフィルタリングに用いるサンプルTick数を入力
lock retention tick:目標がレーダーから消えた際、予測照準で補うTick数を入力
delay tick:ロジックの遅延を何Tick補正するかを入力
capture type:レーダーの信号強度の優先順位を設定
捕捉説明
・レーダーの照射角は、±45度+レーダーのFOV Yの範囲です。
・レーダーの射程を長くしすぎると精度が低下する場合があります。
・sample tickを増やすと、ロックオンまでの時間の増加と、標的が急機動した際の対応が難しくなる代わりに、照準精度が向上します。
・capture typeの信号強度の優先順位設定はそれぞれ、weakest signalは常に最も信号強度の弱い目標、weakest signal when lockedはロック完了時点での最も弱い信号強度の目標、strongest signalは常に最も信号強度の強い目標を優先的に照準します。
・weakest signalは最もチャフに強いですが、ミサイルや小型船などの標的より軽い目標を検知した場合、そちらに照準する可能性があります。weakest signal when lockedはロックオン完了後に検知した目標であれば照準が移りにくく、ある程度のチャフ対策も可能ですが、チャフ対策の性能はweakest signalに劣ります。strongest signalは最もチャフに弱いですが、ミサイルなどの標的より軽い目標には照準しません。