Description
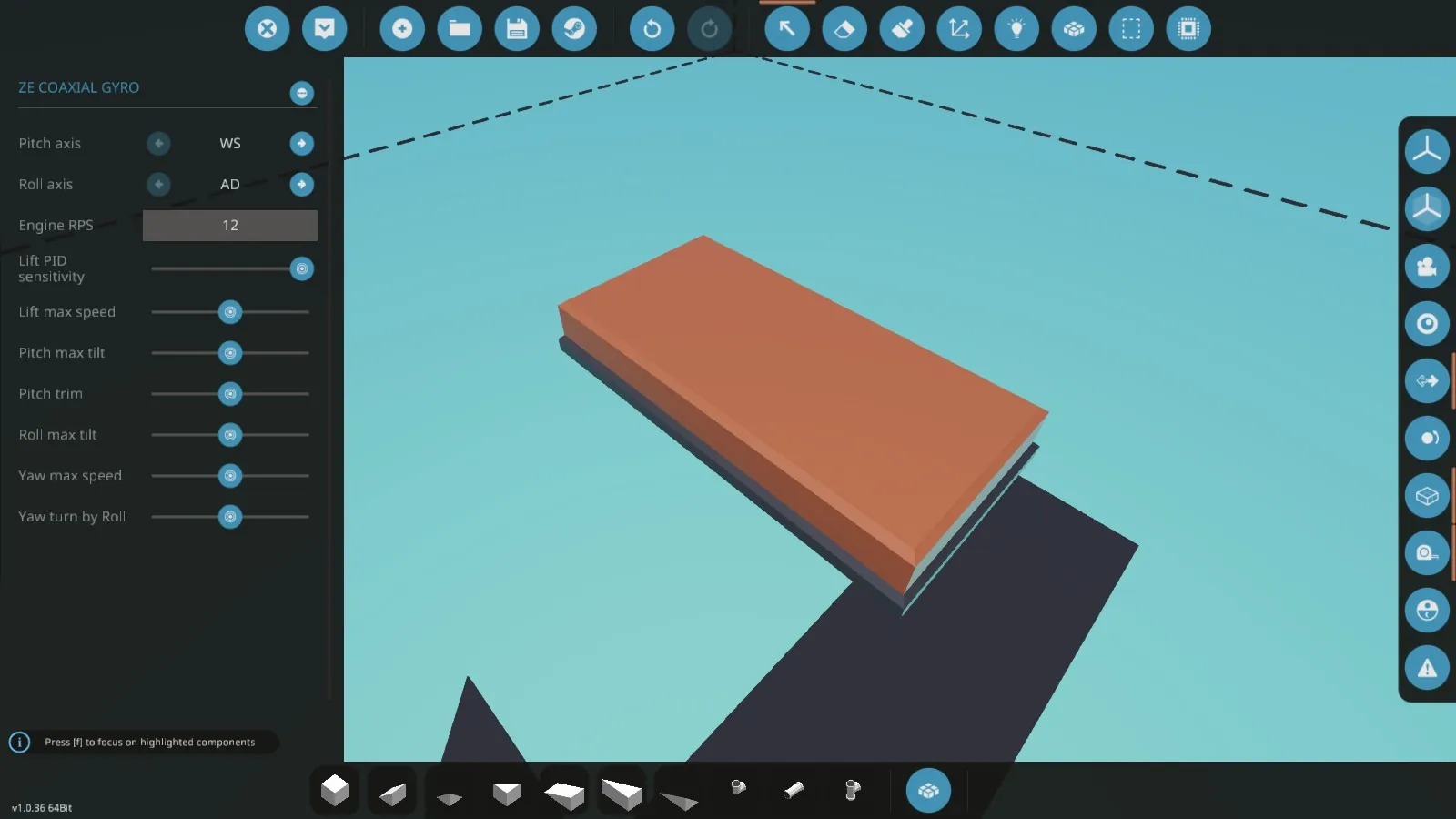
A fully tunable PID-based gyro for helicopters with coaxial rotors only. Providing smooth tilt and yaw stabilization, constant altitude hold, idle position hold, and has optional engine control.
- All functionality enables from the On/Off node.
- Engine control maintains the constant engine RPS and shut it down when overheating. Can handle with both diesel and jet engines.
- Stabilization is configured to automatically hold current altitude and hold position when idle. The inputs for Pitch/Lift and Roll/Yaw are switchable between WASD and arrows. The gyro is capable of turning across the yaw axis with roll tilt when flying forward.
Setup order
- Balance the helicopter that way the center of mass should be as close as possible to the main rotor axis. Fuel tanks are considered empty.
- Rotors should rotate in opposite directions and their main direction arrows should pointing forward. The straightforward way is to place the bottom rotor as is, and place the top rotor mirrored with U hotkey. Set both rotors blade pitch to neutral and an equal blade count.
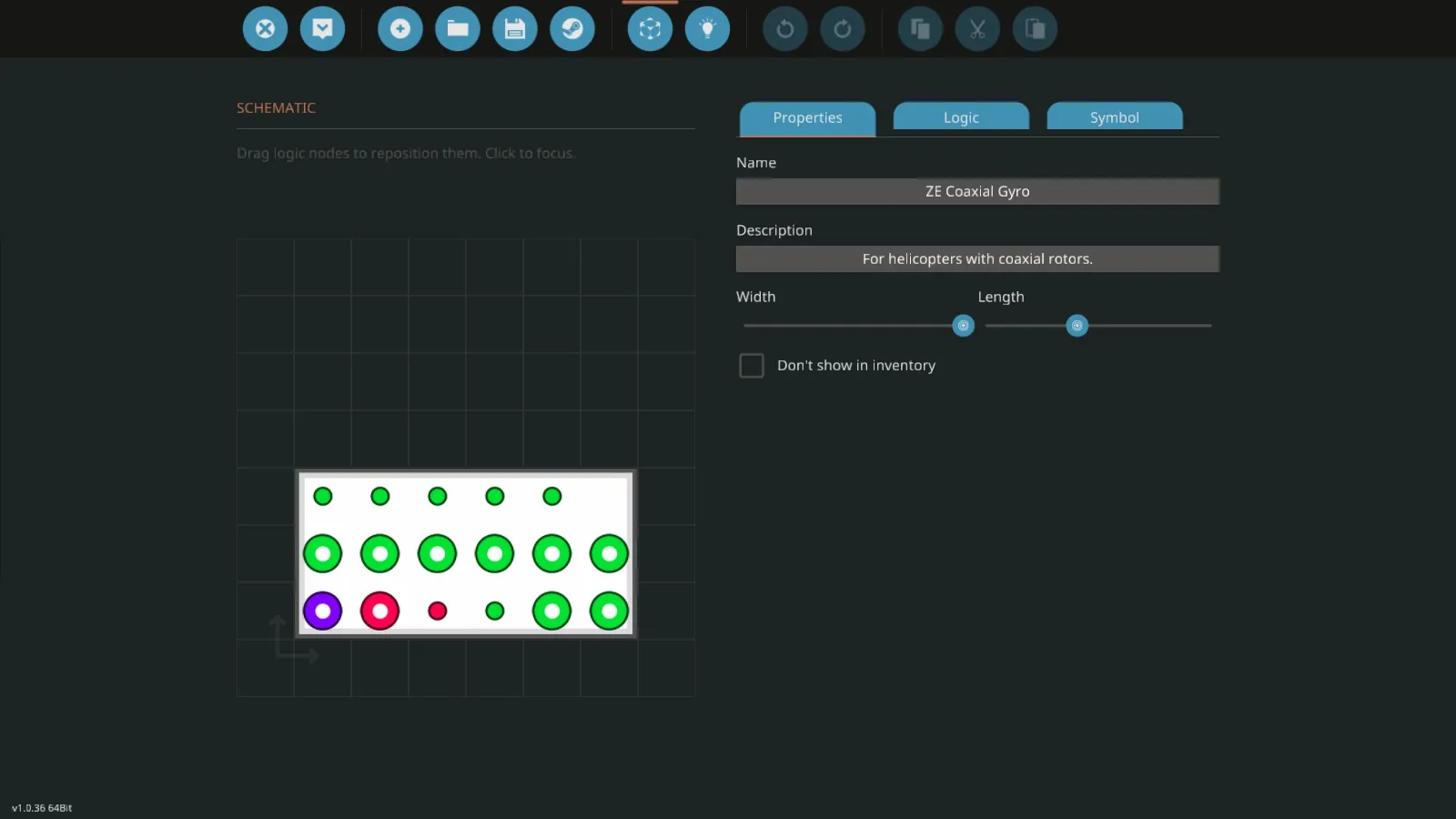
- Install this gyro and connect all logic nodes according their labels. Altimeter should be placed close to the rotors. Linear speed sensors should be set to directional mode. Angular speed sensor should not be mirrored.
- Select the proper helicopter type, seat axis bindings, tune pitch trim and other settings in the controller properties.
- Connect pilot seat to the gyro with a composite link. Set all axis to the reset mode and their trim to 0. Disable the joystick mode.
All done, but my helicopter...
- Tilts too fast or too slow - adjust respective PILOT SEAT axis sensitivity.
- Tilts too much - reduce the respective axis max tilt.
- Tilt overreacts - reduce respective axis PID sensitivity.
- Turns too slow - increase yaw max speed or the sensitivity of PILOT SEAT yaw axis.
- Shakes while hovering or ascending - reduce the main rotor RPS or lift PID sensitivity.
- Does not lift off - increase main rotor thrust with higher RPS or gearboxes.
- Swinging around the equilibrium while hovering - reduce the position hold max tilt.
- Constantly moving on side while hovering - check the weight balancing or tune the MICROCONTROLLER PITCH TRIM. Do not change the pilot seat axis trim because its nonzero values disables the automatic position hold.