Ever tried to create a hovering vehicle, or an autopilot, but your controllers can't get your vehicle to do what it should, or it is oscillating all over the place?
Of course, you could go back to the editor and adjust your PID controllers, but then you have to start your craft from anew, which can be a tedious process.
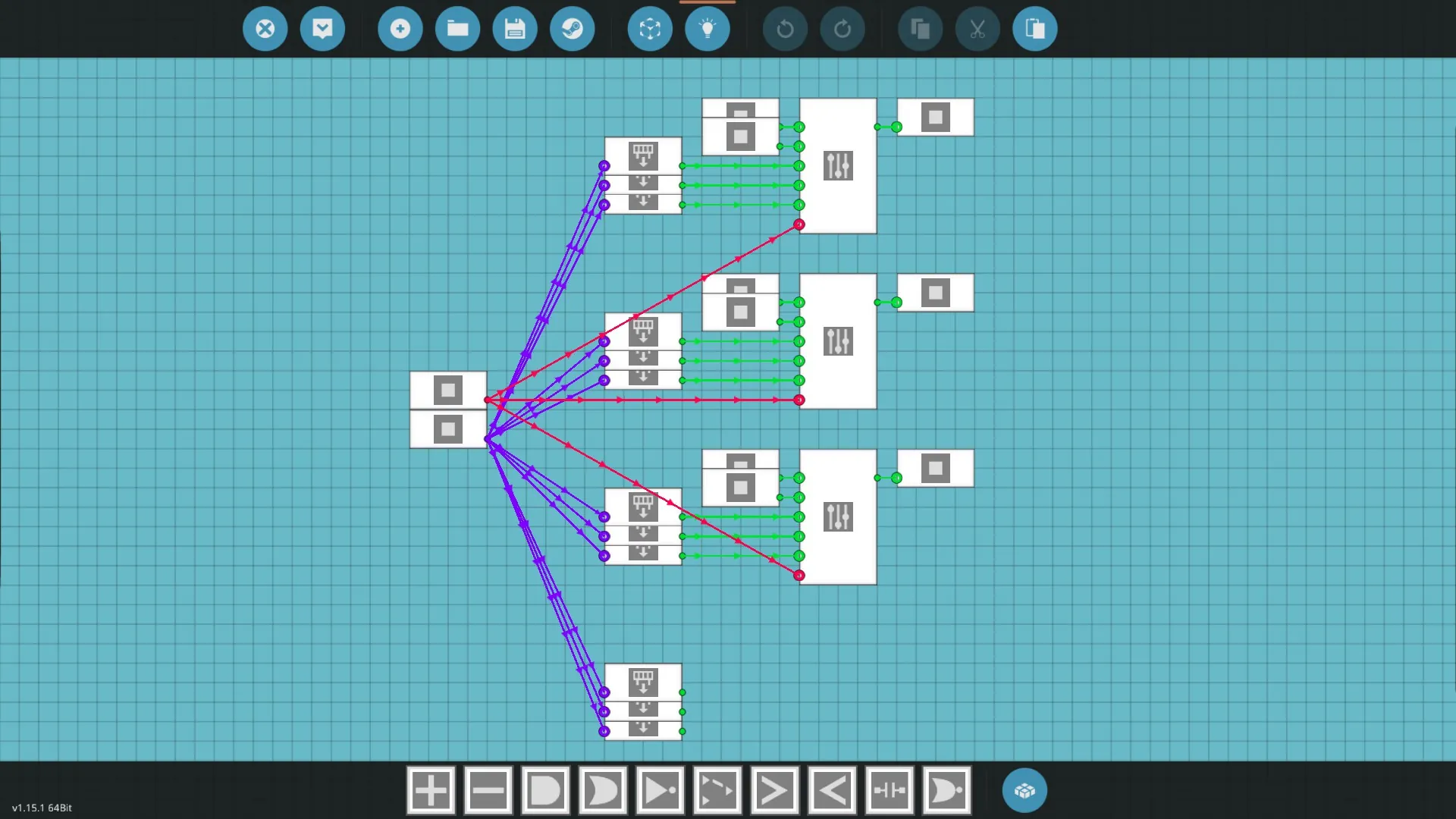
This Microcontroller is what makes your life easier. Just add a temporary screen and keypad to your vehicle, and you can adjust each value of up to 4 PID controllers on the fly!
Just note the new values and adjust them in the LUA script inside the controller.
When your pleased, remove the screen and keypad.
And if something changes on your vehicle, just add them again to fine tune your controllers.