<Description>
This was made in less than an hour.
This has triple PIDS:
1. Primary [Always ON]
2. Secondary (Final Adjustments) [Optional]
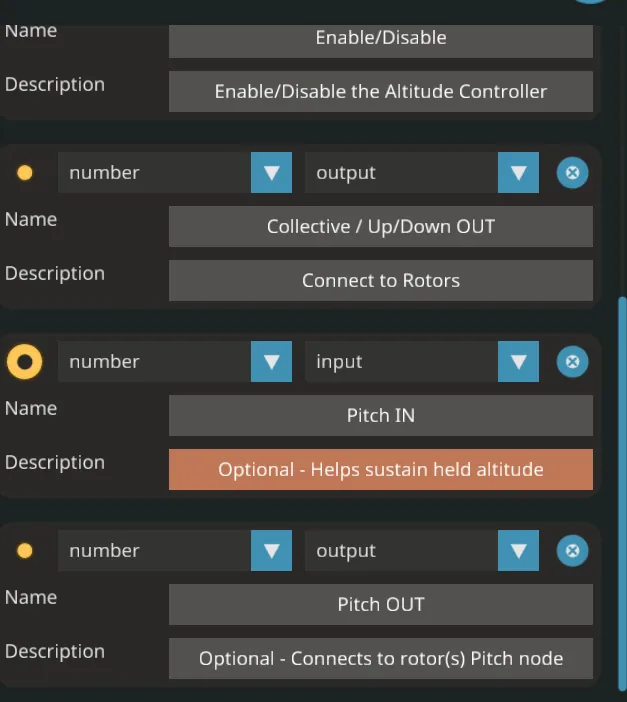
3. Pitch PID (When tilting forward, PID will automatically tilt back to make engine more economical, less strained, and raise altitude.
Enable / Disable the Secondary and/or Pitch PID if issues occur.
The set tooltips display tooltips for that said item to make finding values easier if you are having internal issues with your builds.
The timer makes it when you let go of the UP/DOWN arrows, it has a slight delay before turning on to remove the instant jolt I personally had while flying my helicopters and VTOLs.
The Switch Enabling Mode switches from the Enable/Disable node (as seen externally from the HAV3 Microcontroller) to an, if desired, UP/DOWN reading. This mode makes it so when you let go of the UP/DOWN Arrow, the HAV3 Microcontroller will turn on until the timer is gone through.
The timer will only activate when on the UP/DOWN Mode unless the time, in seconds, is zero.
Help
Q - Jerks up and down for no reason
A - Lower RPS going to propellers
A - Clamp the output
A - Decrease Proportional value in Primary PID
A - Increase Derivative value in Primary PID
-------
Q - When tilting, the controller tilts my vehicle back too much
A - Decrease the Proportional Value in the Pitch PID
A - Increase the Derivative Value in the Pitch PID
Update
Fixed HAV3 not allowing reverse PID decrement to sustain altitude
Fixed HAV3 Pitch Gyro clamping
Added tooltips per section
Added more features compared to before
Added timer [Smoother when letting go of UP/DOWN Arrows]