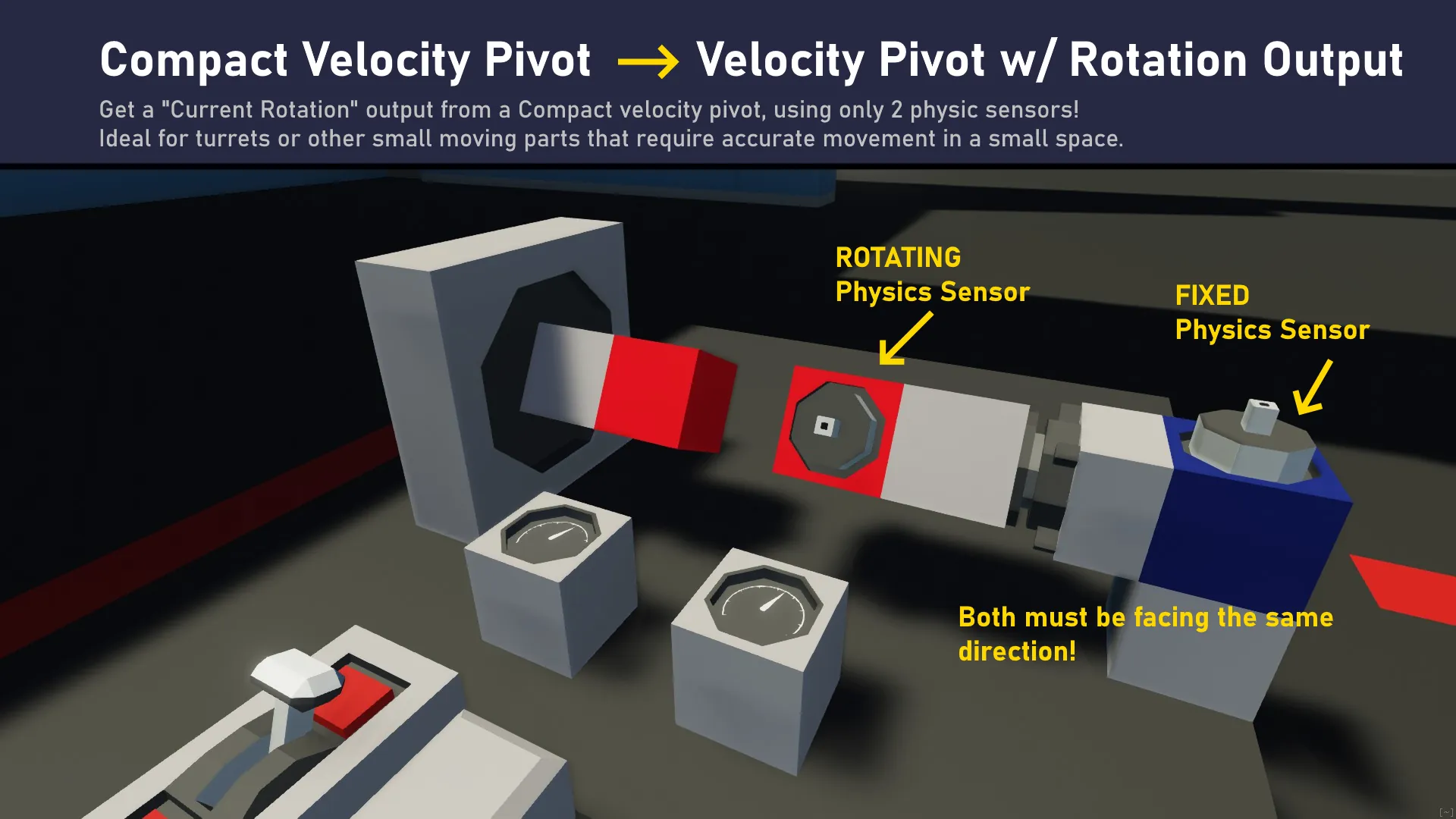
Uses 2 physics sensors to get the "Current Rotation" output of a Velocity Pivot. Best used with Compact Velocity Pivots to measure their turns.
Useful for turrets, cameras, and any small mechanisms that need to move precisely.
MC SIZE:
- 1x2
INPUTS:
- Physics (Fixed): the physics sensor at the base of the pivot.
- Physics (Rotating): The physics sensor at the rotating end of the pivot.
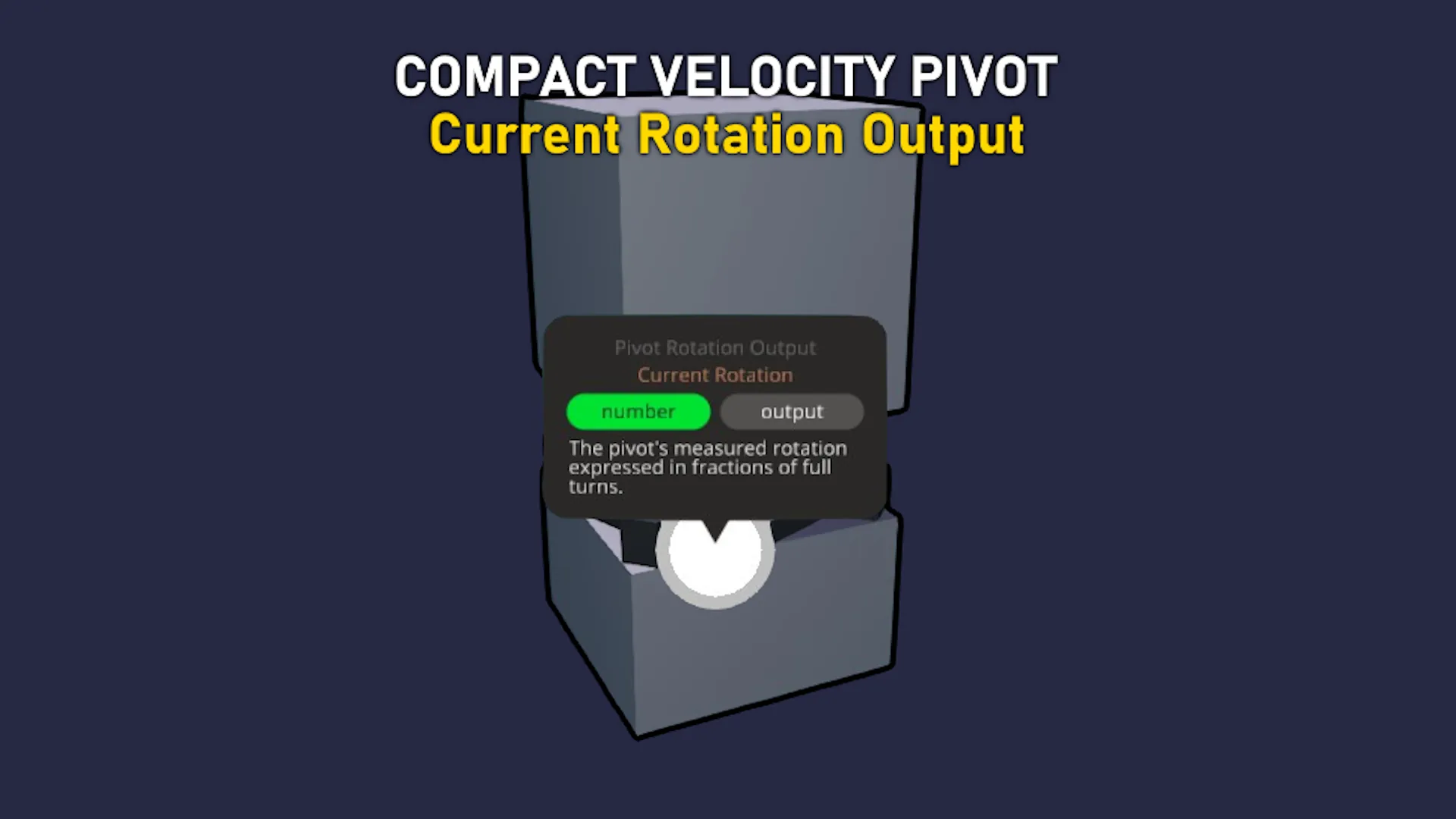
OUTPUTS:
- Current Rotation: The pivot's measured rotation expressed in fractions of full turns. (exactly like the big Velocity Pivots or the turret rings)
NOTES:
- Sensor A (Fixed) must be in same merge as the BASE of the pivot.
- Sensor B (Rotating) must be in the same merge as the ROTATING end of the pivot.
- BOTH sensors must FACE THE SAME DIRECTION in the editor.
- BOTH sensors must be aligned to the axis of rotation of the pivot you want to measure.
- Distance between sensors DOESN'T matter as long as they're aligned.
You CAN use this for your builds. Credit is NOT needed but appreciated.