DESCRIPTION
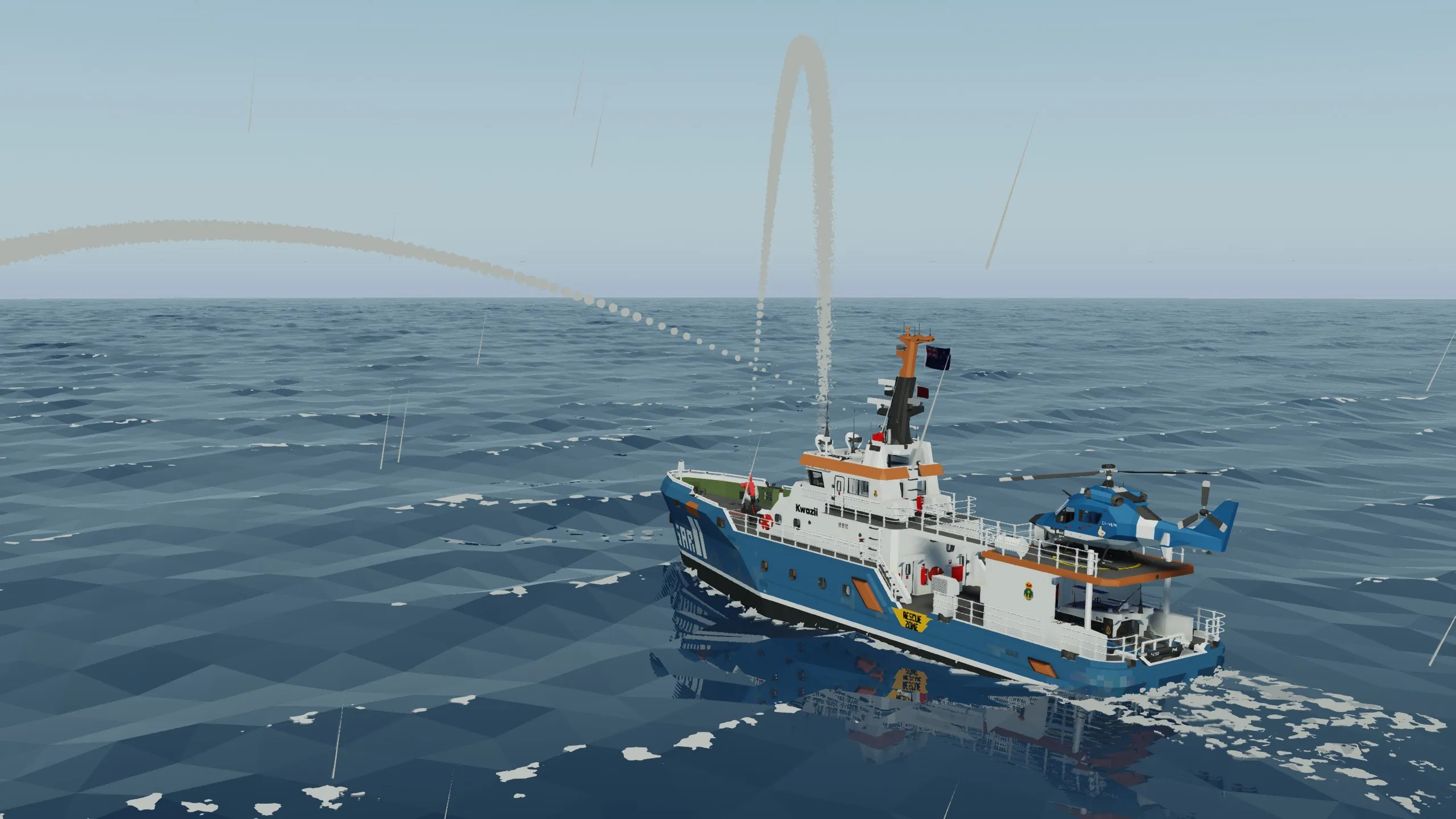
Based on the Harro Koebke[de.m.wikipedia.org] the Kwazii is a 36.5m rescue cruiser or lifeboat. Its design accomidates a stern housed daughterboat and helicopter. There are also 2 water cannons and a fire hose.


FAROESE uses channel 1 for autoland

INSTRUCTIONS
-SYSTEMS key
-STARBOARD Engine/PORT Engine (ship can run just fine on one engine. Both may be required for max speed)
-W/S or throttle lever to set the speed
-A/D for Yaw
-LEFT/RIGHT for bow thruster
MFD
select the green bar at the bottom of the screen to bring up the buttons
-MAP
press on the map to navigate around
A to add a waypoint (alternatively use the keypad) many waypoints can be added to form a path
L to delete the last placed waypoint
C to clear all waypoints
R to recenter the map on the boat
+- for zoom
-RADAR
TX to toggle the radar on
STBY to turn it off
RNG turns on range markers
TRL add a ghost trail to the radar
POS will display current gps position
+- to change the radars range
-DPS
this screen displays speed, depth and roll aswel as the compass and wind direction
-ENGINE SCREEN
displays engine info and fuel status
-CAM SCREEN
select FRQ to tune into another vessels cameras. Currently only the SRS vehicles have cam screens refer to the SRS collection workshop page for a list of used frequencies
-CAMERAS
use the arrows to switch between cameras
SPECIFICATIONS
Cost: $329,467
Mass: 39,752
Length:36.5M
Width: 8.25M
Height: 16.5M
Fuel: 21000L
Top speed: 45kts (35 kt cruise)
Seats: yes
Engine: twin KA 4 cylinder Diesel
CREDITS
Advanced LIDAR for Ship v1.2 (19-05-29) - Ready-to-Install Kit
Transponder Locator
Ze modular engine controller
KO Ultimate Exterior Decoration Pack
TIBU Furniture XML PACK I (Room furniture)
NOTES
- the rear boat berth can be difficult to operate on low/medium physics
may require some back and forth with the loader / encouragement with the door
- auto land for the c heli is channel 0
- Brizo also uses channel 0
- Faroses uses channel 1
UPDATES
-added a mast fold
-fixed the winch for the boat berth (its not needed but nice to have)
-utilised the dials in the engine room
-added logic to the rear (decoration) radio(just duplicated the existing radio)
if you have any suggestions for things to fix or improve let me know. This project got kinda overwhelming towards the end a lot of things could be better.