Overview
This radar is equipped with an anti-chaff function that can handle up to six chaffs, and is used to detect ships and aircraft. It outputs the coordinates and speed of the target being detected.
Specifications
[list]
[*] Maximum detection distance 16[km]
[*] Minimum detection distance 161[m] (large ship with mass of 100000[mass])
[*] Minimum detection distance 16.1[m] (small ship with mass of 10000[mass])
[*] Maximum anti-chaff distance 16[km]
[*] Signal strength of chaff judgment weight 620[mass/m]
[*] Full anti-chaff up to 6 shots (does not work if chaff judgment weight falls off)
[*] Noise filtering using linear least squares method
[*] Compatible with SR1 [url=https://steamcommunity.com/sharedfiles/filedetails/?id=2772824489]https://steamcommunity.com/sharedfiles/filedetails/?id=2772824489[/url]
[*] Can be used upside down
[/list]
Operation method
Basic operation
①Turn on the "Power" key switch and the "Auto aim" button.
②Use the WASD keys to aim the FCR at the target you want to capture.Keep the target in the center.
③Use the "Number of samples" lever to adjust the number of samples for noise filtering.
④When "Locked!" appears on the display, the target information will be output to the ELI2 composite.
Disable the anti-chaff function
①Press the "Remove anti-chaff weight" button.
Use this function when a large ship approaches you to the minimum detection distance.
Anti-ship mode
Press the "Anti ship mode" button to switch to anti-ship mode.
Anti-ship mode sets the target's Z to 0[m] (surface) and Vz to 0[m/tick].It ignores vertical movement, improving accuracy.
About when "Anti-chaff OFF!" is displayed
This message appears when the enemy uses 7 or more rounds of chaff or when the chaff judgment weight is removed.
ELI2 output
Numeric channels
1: Target X [m] (World coordinates on the same axis as GPS sensor X)
2: Target Y [m] (World coordinates on the same axis as GPS sensor Y)
3: Target Z [m] (World coordinates on the same axis as altitude sensor)
4: Target Vx [m/tick] (Velocity in world coordinates on the same axis as the GPS sensor's X axis)
5: Target Vy [m/tick] (Velocity in world coordinates on the same axis as the GPS sensor's Y axis)
6: Target Vz [m/tick] (Velocity in world coordinates on the same axis as the altitude sensor)
7 to 32: Signal for internal control
Logical channel
1: Locked (True when target information is being output)
2 to 32: Signal for internal control
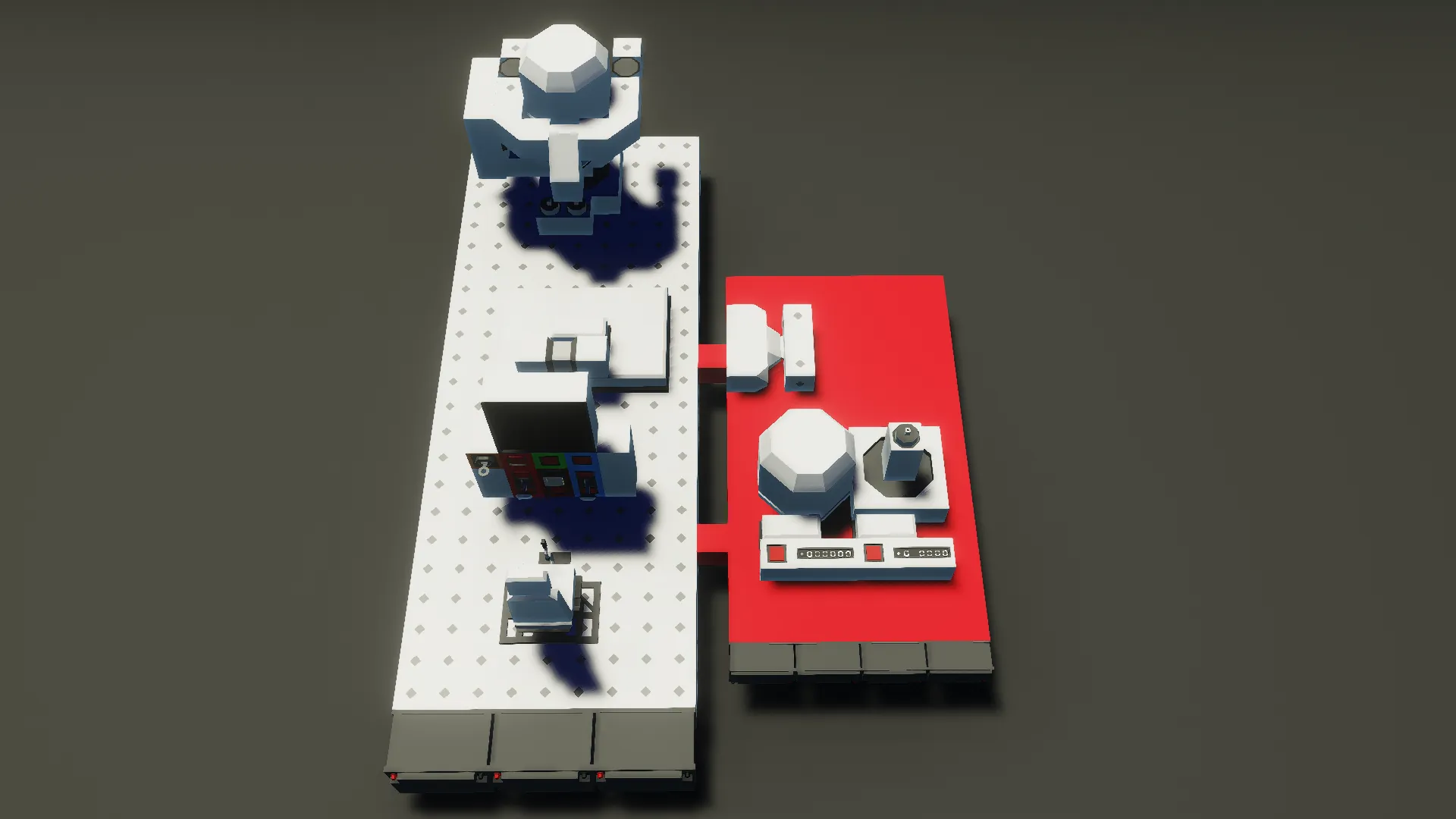
How to install
①Delete the red part on the right. (This is for property settings)
②Move it by cutting and pasting.
③Connect the merge and power nodes.
Changing FOV and Radar
Changing the FOV will change the maximum value of Time since detection, which will cause calculations to go wrong.
When changing the FOV, please also change the property "Max time since detection [tick]".
Current version
v1.1.0
Program
[url=https%3A%2F%2Fdrive.google.com%2Fdrive%2Ffolders%2F1YBA4Wlp3YO41A8nQWn63BCa_urojNXDO%3Fusp%3Dsharing]https://drive.google.com/drive/folders/1YBA4Wlp3YO41A8nQWn63BCa_urojNXDO?usp=sharing[/url]
Others
[list]
[*] You can remodel it.
[*] You may distribute it secondarily (if you modify it).
[*] You can incorporate it.
[*] You can make a video.
[*] You don't have to get permission.
[/list]
I used google translate