PID with windup protection and minimal latency. You could replace the property blocks with input nodes. Supports dynamic setpoint and dynamic gains.
Limitations:
-Windup limits need to be entered in the function block
- Cannot be turned off
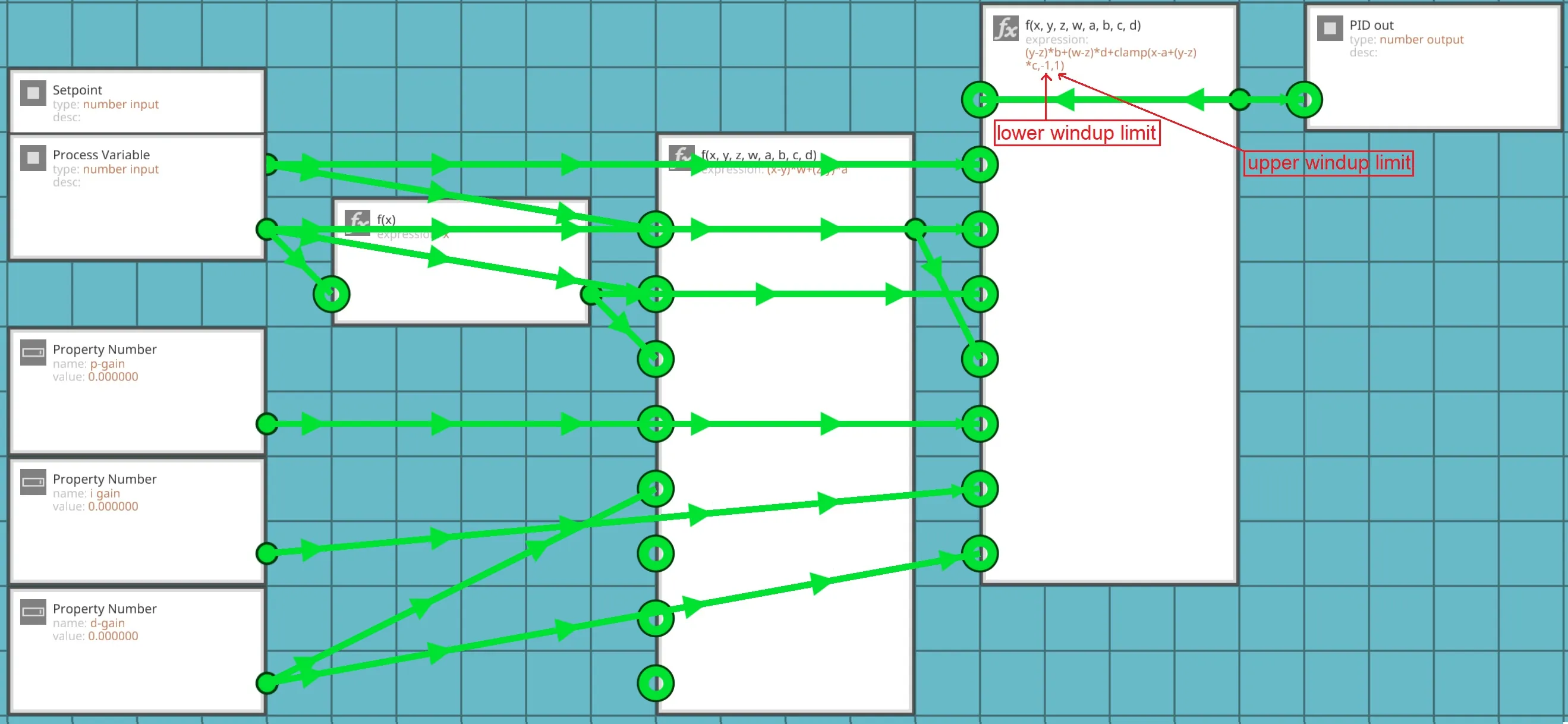
Here is the function: (y-z)*b+(w-z)*d+clamp(x-a+(y-z)*c,-1,1)
The last two numbers are lower windup limit and upper windup limit