Github Link [github.com]
Microcontroller Workshop Collection
Thanks to SentyFunBall for all their help with my lua journey.
Thanks to Trapdoor for the PID function.
This is a twin rudder stabilizer for boats written in lua based on the math of this Roll/Pitch Stabilizer for Ships workshop creation by Aldi Süd
Also uses math from Rudder Controller by sengir_vampire to handle the heading correction of the yaw rudder.
Will remove from listing if deemed to be a rip off, but I feel it is transformative enough to justify.
Same controls as before, have two rudders facing positive upward in the stern and connect each relevant output.
Uses a normal rudder for yaw steering and maintains heading based on previous heading.
Updated to use a single physics sensor and slim down the footprint as well as do all the math in lua.
Updated 10/23: Now actually working!
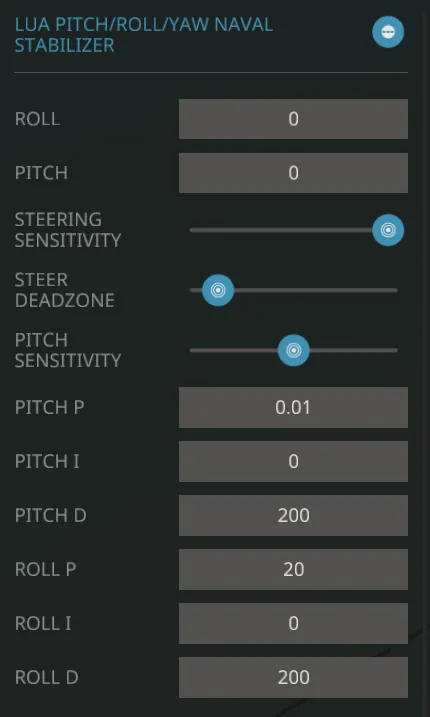
PID values are tuned to the test boat pictured, adjust P and D values to match the needs of your creation.