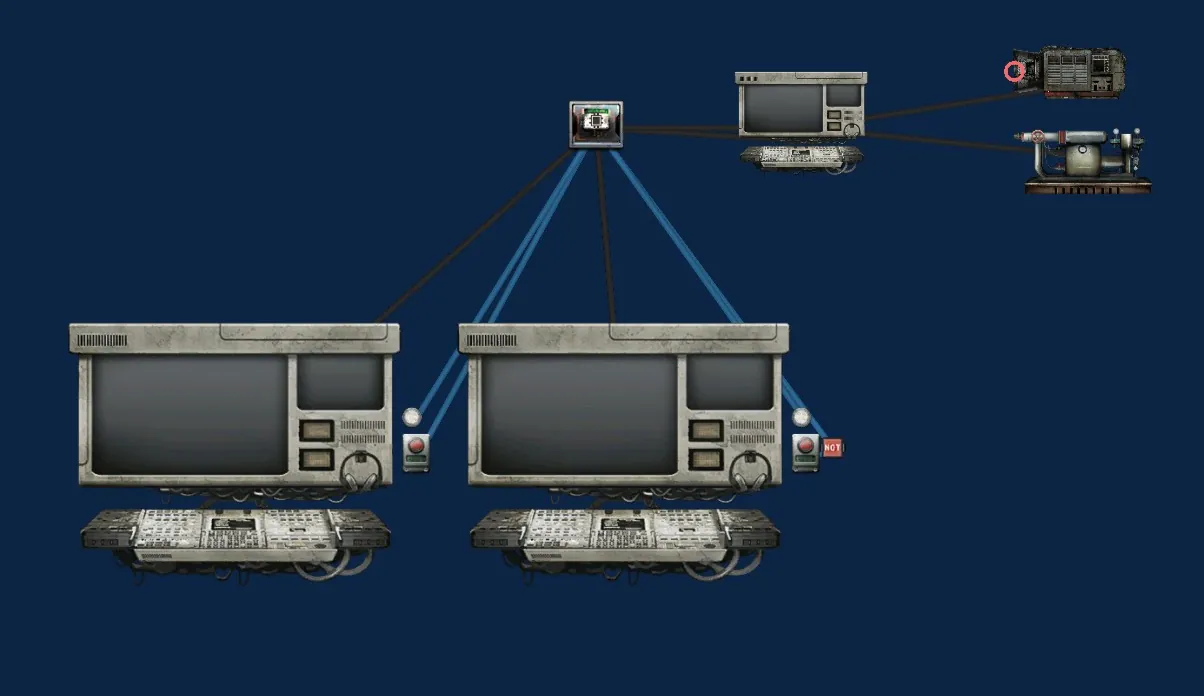
Allows multiple navigation terminals to control a single ship without weird desyncing issues. One nav terminal is controlling the ship, and the other displays the correct velocity vector, which is unable to be changed until that terminal is activated and the vector actually registers to the ship's "real" nav system. It uses a third invisible / indestructible terminal to sync the inputs (because without it, the terminals cant override the auto pilot inputs of each other).
I made this because I assumed this would be the default behavior of terminals, and I was extremely annoyed to find out it isn't.