ENG:
Autopilot controller, guides the boat through control points.
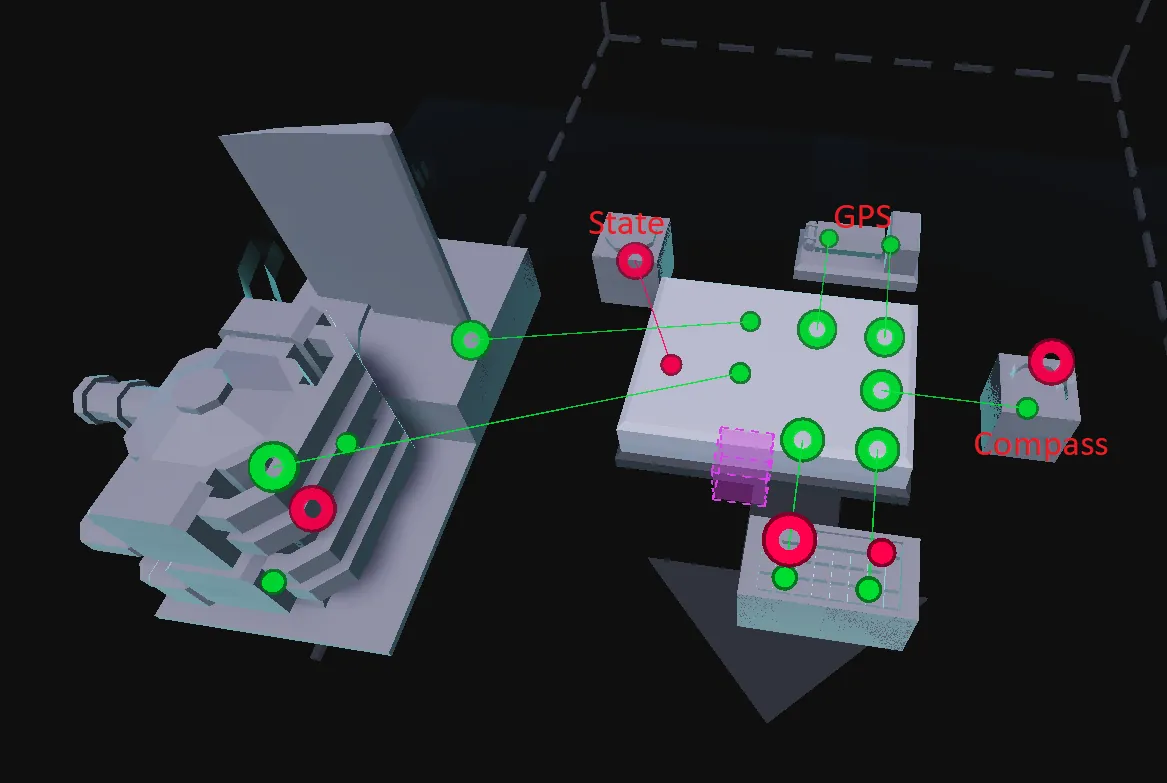
Nodes:
x, y - data from the GPS sensor
compas - data from the compass sensor
kb x, kb y - data from the keyboard
mon - touch composite on the monitor
rudder - rudder control node
throttle - engine throttle control node
vid out - video output to the monitor (minimum 2x2)
run - autopilot status, true if running
Properties:
max throttle - cruising throttle value for the engine
turning throttle - throttle value for the engine when reaching 50m away from the control point
turn limit - limit on the rudder value during a turn
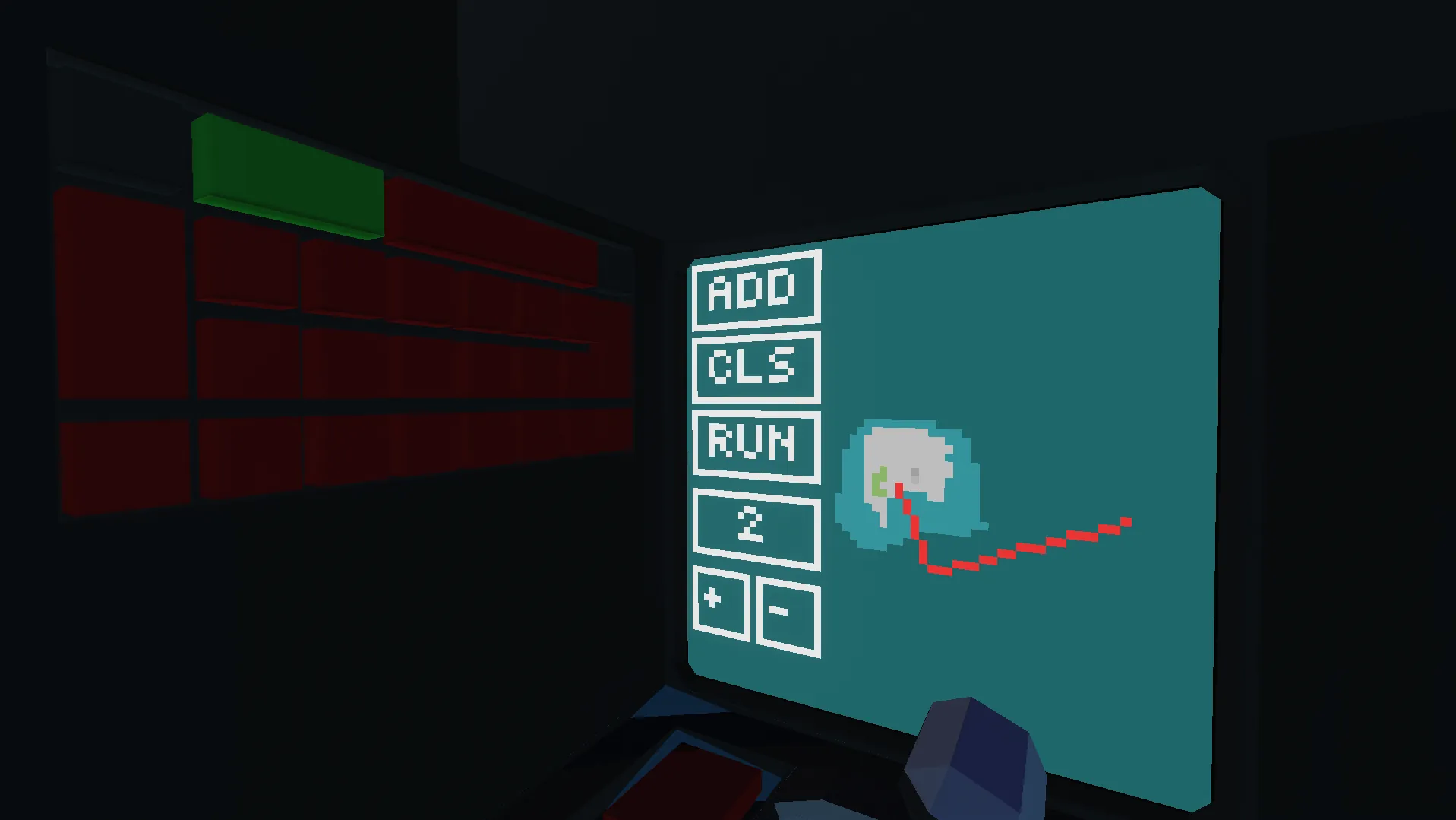
Interface:
ADD - adds a point to the route list from keyboard input
CLS - clears the list
RUN/STP - start/stop autopilot
(number) - text indicating the number of control points in the route list
[+] [-] - zoom control
Quick guide:
Enter coordinates using the keyboard
Press [ADD]
Repeat to define the route
Prepare the vehicle for movement (start the engine) (*throttle may not be used directly on the engine; it may be used on your engine controller or clutch)
Press [RUN], the button will change and movement will begin. Once the last control point is reached, the autopilot will turn off
RU:
Контроллер для автопилота, направляет корабль по контрольным точкам.
Ноды:
x, y - данный из сенсора GPS
compas - данные из сенсора компаса
kb x, kb y - данный из клавиатуры
mon - композит касания на монитор
rudder - нода управления плавником
throttle - нода управления дросселем двигателя
vid out - выход видео на монитор (минимум 2х2)
run - статус автопилота, истина если запущен
Параметры контроллера:
max throttle - маршевое значение дросселя на двигатель
turning throttle - значение дросселя на двигатель при достижение 50м до контрольной точки
turn limit - ограничение значения на плавник во время поворота
Интерфейс:
ADD - добавляет точку в маршрутный список из данных клавиатуры
CLS - отчистка списка
RUN/STP - запуск/стоп автопилота
(число) - текст, указывающий на количество контрольных точек в маршрутном списке
[+] [-] - управление приближением карты
Краткая инструкция:
Ввести координаты в клавиатуру
Нажать [ADD]
Повторить, чтобы проложить маршрут
Подготовить транспорт к движению (завести двигатель) (*throttle может использоватся не напрямую в двигатель, он может использовать в вашем контроллере двигателя или сцеплением)
Нажать [RUN], кнопка сменится и движение начнется, по достижению последней контрольной точки автопилот выключится